Симулятор наполнения/опорожнения ёмкости.
Клапан не двухпозиционный, а регулирующий. ШИМ релейных выходов контроллера медленный, период несущей несколько секунд. Это всего лишь для замедления регулирования. Иначе электропривод клапана начинает гонять туда-сюда безостановочно.
Может постоянная времени "несколько секунд" ?
Если имеется в виду интегральный коэффициент ПИДа, то да, он тоже в районе нескольких секунд. Полный ход клапана обычно 30 секунд.
Если клапан с позиционером - нафег тогда релейный выход регулятора? Почему не аналоговый? С релейным управлением - это как раз и получится "задрочить механизм клапана".
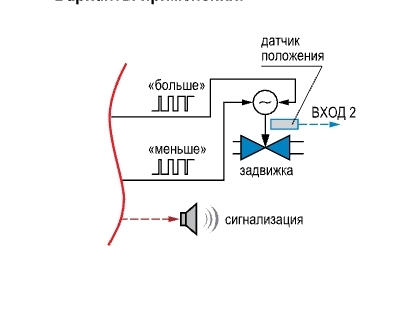
Если клапан не имеет аналогового входа, а просто с отдельным датчиком положения - тогда просится отдельный регулятор положения клапана, а выход регулятора уровня - на вход регулятора положения клапана.
Eugene.A: Если имеется в виду интегральный коэффициент ПИДа
Нет, имеется в виду :
Eugene.A: ШИМ релейных выходов контроллера медленный, период несущей несколько секунд.
Andrew55: это как раз и получится "задрочить механизм клапана".
А я всё никак не мог подобрать определение 
Eugene.A: выходы ПИД-регулятора ПЛК вырабатывают импульсы управления клапаном, длительность и частота которых зависит от величины рассогласования между уставкой уровня и фактическим уровнем
Вообще-то у ПИД-регулятора — " длительность и частота которых зависит от величины рассогласования между уставкой уровня и фактическим уровнем", длительности этого рассогласования и скорости его изменения. Настройка такого регулятора - задача исключительно сложная, посему и применяется он в исключительно крайних случаях. В 99% случаев достаточно ПИ - регулятора, настройка которого легче на порядки. В цехе, где я работал в прошлой жизни, количество регуляторов исчислялось многими десятками, и ПИД среди них не было ни одного.
Вообще гидравлика моделируется электрикой почти идеально. Однако там будет большое количество тонкостей - типа учесть пропускную способность клапана в зависимости от степени его открытия (она может быть какой угодно), влияние уровня в баке на вытекающий расход - да много чего. Если не учесть - будет примитивно, и настройка на стенде не позволит работать в реале. Если учесть - слишком сложно, так как учесть надо будет вплоть до погоды в Санкт-Петербурге.
...а если привод настолько тугодумный (полный ход 30 с ?) - это одно из главных, что надо учесть при моделировании.
| Andrew55 сегодня, 05:42 (сегодня, 05:44) |
Вообще-то у ПИД-регулятора — " длительность и частота которых зависит от величины рассогласования между уставкой уровня и фактическим уровнем", длительности этого рассогласования и скорости его изменения. |
Ну да, всё именно так, просто не стал расписывать смысл каждой буквы ПИД. Кому интересно, может сам найти информацию, а кто знает, как вы, тому и объяснять не надо.
Просто по умолчанию в большинстве случаев в программе ПЛК используются готовые функциональные блоки ПИД из библиотек, но никто не запрещает занулить дифференциальную составляющую. В медленных процессах, какими являются, например, регулирование отопления или поддержание уровня в котле или деаэраторе, достаточно ПИ регулятора.
В данном случае влияний цен на апельсины в Африке не так много. Клапаны мы устанавливаем обычно с линейной зависимостью пропускной способности от угла поворота или хода штока. Забор из ёмкости осуществляется насосами, так что от уровня точно не зависит. Всё, естественно, не учтёшь, но на то и пусконаладка.
Цель, в общем-то, не настроить всё до блеска, а в основном выявить глюки и косяки в реализации алгоритмов и железе. Они случаются, и могут попить крови, особенно, если объект далеко.
Всякие опасения о задрачивании приводов клапанов напрасны, поскольку они именно на такую работу и рассчитаны. Мы используем самые простые, без позиционеров, аналоговых входов и датчиков положения, поскольку разницы в работе особо не заметно. Задрочить привод запросто можно и аналоговым ПИДом, если он не настроен. То, что управление дискретное с ШИМ вовсе не означает, что клапан будет носиться туда-сюда. Когда величина рассогласования уменьшится до величины меньше зоны нечувствительности, длительность импульсов сойдёт на ноль и привод встанет. И пока расход из бака будет равен притоку, клапан будет стоять. А долго стоять ему нельзя, клапан прикипит:-).
Дело в том, что один такой имитатор я сделал довольно давно и успешно использую. Но он заточен под регулирование температуры подачи отопления/ГВС, и на выходе его нагреватель, а в обратной связи термодатчик.
Кстати - если ваш клапан на открытие отрабатывает от подачи напряжения, то на закрытие - сменой полярности? Он ведь тогда сам будет работать интегратором - при неизменном сигнале от регулятора будет продолжать открываться или закрываться с бОльшей или меньшей скоростью. Уменьшение ширины импульсов не повлечет за собой прикрытие клапана, а только замедлится его открытие.
Тогда основная задача имитировать не бак с водой (это Вы уже нарисовали), а именно работу клапана. Причем с достоверными временнЫми характеристиками.
Какого порядка величины - за сколько секунд/минут/часов полностью открытый клапан способен налить полный бак при отсутствии разбора?